

A KALMAN-LIKE ALGORITHM WITH NO REQUIREMENTS FOR NOISE AND INITIAL CONDITIONS

Target Detection and Localisation
Přednášející: Yuriy Shmaliy, Autoři: Yuriy Shmaliy, Guanajuato University, Mexico
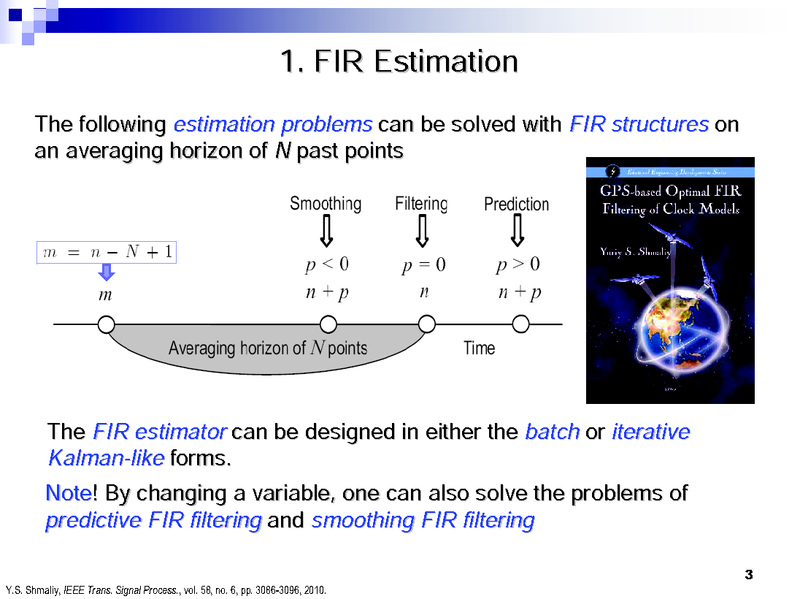
We address a Kalman-like estimator for solving universally the problems of filtering (p=0), prediction (p>0), and smoothing (p<0) of discrete time-varying state-space models with no requirements for noise and initial conditions. The estimator proposed overperforms the Kalman one when 1) noise covariances and initial conditions are not known exactly, 2) noise constituents are not white sequences, and 3) both the system and measurement noise components need to be filtered out and the deterministic state estimated. Otherwise, the Kalman-like and Kalman filters produce similar errors. A numerical comparison of the Kalman and Kalman-like estimators is provided.
Informace o přednášce
| Nahráno: | 2011-05-25 09:50 - 10:10, Club B |
|---|---|
| Přidáno: | 20. 6. 2011 01:00 |
| Počet zhlédnutí: | 25 |
| Rozlišení videa: | 1024x576 px, 512x288 px |
| Délka videa: | 0:25:40 |
| Audio stopa: | MP3 [8.71 MB], 0:25:40 |
Příbuzné přednášky
 0:19:06
0:19:06
MULTI-SENSOR PHD: CONSTRUCTION AND IMPLEMENTATION BY SPACE PARTITIONING
Target Detection and Localisation
Přidáno: 20. 6. 2011 00:12
 0:18:47
0:18:47
AN APPROXIMATE MINIMUM MOSPA ESTIMATOR
Target Detection and Localisation
Přidáno: 19. 6. 2011 19:09
Komentáře